ESP32 + ArduCam OV2640

Arducam OV2640 est une camera 2Mp.
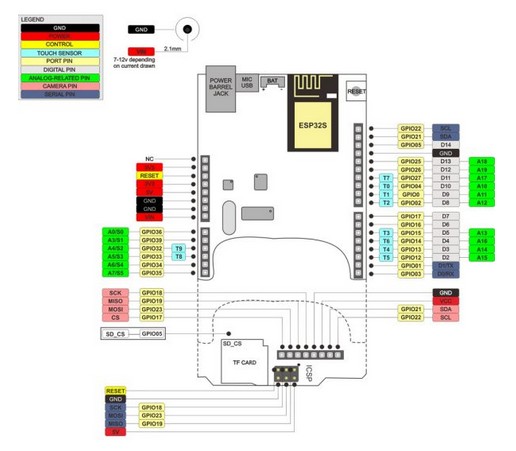
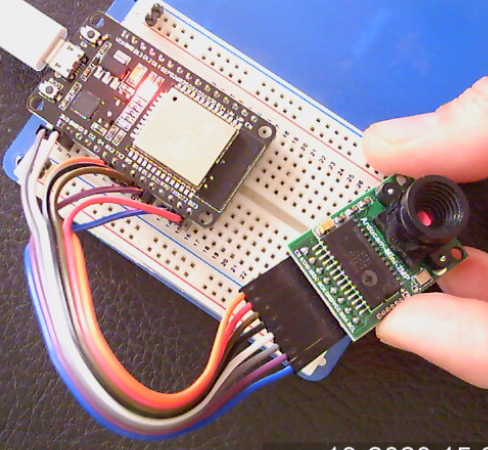
Branchement de l’ArduCam sur l’ESP32
Installer la carte et les librairies
- Installer le depôt dans le gestionnaire de carte de l’IDE Arduino : http://www.arducam.com/downloads/ESP32_UNO/package_ArduCAM_ESP32S_UNO_index.json
- Dans le gestionnaire de carte, installer ArduCAM_ESP32S_UNO by ArduCAM.
- Ajouter les librairies avec Git. https://github.com/ArduCAM/ArduCAM_ESP32S_UNO
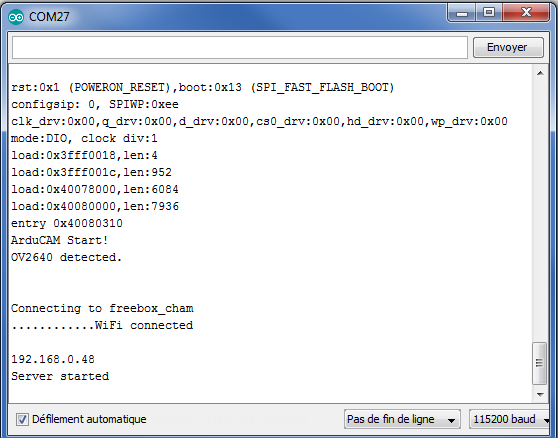
Upload
Renseignez le réseau Wifi : SSID et PASSWORD
#include <WiFi.h>
#include <Wire.h>
#include <ESP32WebServer.h>
#include <ArduCAM.h>
#include <SPI.h>
#include "memorysaver.h"
#if !(defined ESP32 )
#error Please select the ArduCAM ESP32 UNO board in the Tools/Board
#endif
//This demo can only work on OV2640_MINI_2MP or ARDUCAM_SHIELD_V2 platform.
#if !(defined (OV2640_MINI_2MP)||defined (OV5640_MINI_5MP_PLUS) || defined (OV5642_MINI_5MP_PLUS) \
|| defined (OV5642_MINI_5MP) || defined (OV5642_MINI_5MP_BIT_ROTATION_FIXED) \
||(defined (ARDUCAM_SHIELD_V2) && (defined (OV2640_CAM) || defined (OV5640_CAM) || defined (OV5642_CAM))))
#error Please select the hardware platform and camera module in the ../libraries/ArduCAM/memorysaver.h file
#endif
// set GPIO17 as the slave select :
const int CS = 17;
const int CAM_POWER_ON = D10;
#if defined (OV2640_MINI_2MP) || defined (OV2640_CAM)
ArduCAM myCAM(OV2640, CS);
#elif defined (OV5640_MINI_5MP_PLUS) || defined (OV5640_CAM)
ArduCAM myCAM(OV5640, CS);
#elif defined (OV5642_MINI_5MP_PLUS) || defined (OV5642_MINI_5MP) || defined (OV5642_MINI_5MP_BIT_ROTATION_FIXED) ||(defined (OV5642_CAM))
ArduCAM myCAM(OV5642, CS);
#endif
//you can change the value of wifiType to select Station or AP mode.
//Default is AP mode.
int wifiType = 0; // 0:Station 1:AP
//AP mode configuration
//Default is arducam_esp8266.If you want,you can change the AP_aaid to your favorite name
const char *AP_ssid = "arducam_esp32";
//Default is no password.If you want to set password,put your password here
const char *AP_password = NULL;
//Station mode you should put your ssid and password
const char *ssid = "SSID"; // Put your SSID here
const char *password = "PASSWORD"; // Put your PASSWORD here
static const size_t bufferSize = 2048;
static uint8_t buffer[bufferSize] = {0xFF};
uint8_t temp = 0, temp_last = 0;
int i = 0;
bool is_header = false;
ESP32WebServer server(80);
void start_capture(){
myCAM.clear_fifo_flag();
myCAM.start_capture();
}
void camCapture(ArduCAM myCAM){
WiFiClient client = server.client();
uint32_t len = myCAM.read_fifo_length();
if (len >= MAX_FIFO_SIZE) //8M
{
Serial.println(F("Over size."));
}
if (len == 0 ) //0 kb
{
Serial.println(F("Size is 0."));
}
myCAM.CS_LOW();
myCAM.set_fifo_burst();
if (!client.connected()) return;
String response = "HTTP/1.1 200 OK\r\n";
response += "Content-Type: image/jpeg\r\n";
response += "Content-len: " + String(len) + "\r\n\r\n";
server.sendContent(response);
i = 0;
while ( len-- )
{
temp_last = temp;
temp = SPI.transfer(0x00);
//Read JPEG data from FIFO
if ( (temp == 0xD9) && (temp_last == 0xFF) ) //If find the end ,break while,
{
buffer[i++] = temp; //save the last 0XD9
//Write the remain bytes in the buffer
if (!client.connected()) break;
client.write(&buffer[0], i);
is_header = false;
i = 0;
myCAM.CS_HIGH();
break;
}
if (is_header == true)
{
//Write image data to buffer if not full
if (i < bufferSize)
buffer[i++] = temp;
else
{
//Write bufferSize bytes image data to file
if (!client.connected()) break;
client.write(&buffer[0], bufferSize);
i = 0;
buffer[i++] = temp;
}
}
else if ((temp == 0xD8) & (temp_last == 0xFF))
{
is_header = true;
buffer[i++] = temp_last;
buffer[i++] = temp;
}
}
}
void serverCapture(){
delay(1000);
start_capture();
Serial.println(F("CAM Capturing"));
int total_time = 0;
total_time = millis();
while (!myCAM.get_bit(ARDUCHIP_TRIG, CAP_DONE_MASK));
total_time = millis() - total_time;
Serial.print(F("capture total_time used (in miliseconds):"));
Serial.println(total_time, DEC);
total_time = 0;
Serial.println(F("CAM Capture Done."));
total_time = millis();
camCapture(myCAM);
total_time = millis() - total_time;
Serial.print(F("send total_time used (in miliseconds):"));
Serial.println(total_time, DEC);
Serial.println(F("CAM send Done."));
}
void serverStream(){
WiFiClient client = server.client();
String response = "HTTP/1.1 200 OK\r\n";
response += "Content-Type: multipart/x-mixed-replace; boundary=frame\r\n\r\n";
server.sendContent(response);
while (1){
start_capture();
while (!myCAM.get_bit(ARDUCHIP_TRIG, CAP_DONE_MASK));
size_t len = myCAM.read_fifo_length();
if (len >= MAX_FIFO_SIZE) //8M
{
Serial.println(F("Over size."));
continue;
}
if (len == 0 ) //0 kb
{
Serial.println(F("Size is 0."));
continue;
}
myCAM.CS_LOW();
myCAM.set_fifo_burst();
if (!client.connected()) break;
response = "--frame\r\n";
response += "Content-Type: image/jpeg\r\n\r\n";
server.sendContent(response);
while ( len-- )
{
temp_last = temp;
temp = SPI.transfer(0x00);
//Read JPEG data from FIFO
if ( (temp == 0xD9) && (temp_last == 0xFF) ) //If find the end ,break while,
{
buffer[i++] = temp; //save the last 0XD9
//Write the remain bytes in the buffer
myCAM.CS_HIGH();;
if (!client.connected()) break;
client.write(&buffer[0], i);
is_header = false;
i = 0;
}
if (is_header == true)
{
//Write image data to buffer if not full
if (i < bufferSize)
buffer[i++] = temp;
else
{
//Write bufferSize bytes image data to file
myCAM.CS_HIGH();
if (!client.connected()) break;
client.write(&buffer[0], bufferSize);
i = 0;
buffer[i++] = temp;
myCAM.CS_LOW();
myCAM.set_fifo_burst();
}
}
else if ((temp == 0xD8) & (temp_last == 0xFF))
{
is_header = true;
buffer[i++] = temp_last;
buffer[i++] = temp;
}
}
if (!client.connected()) break;
}
}
void handleNotFound(){
String message = "Server is running!\n\n";
message += "URI: ";
message += server.uri();
message += "\nMethod: ";
message += (server.method() == HTTP_GET)?"GET":"POST";
message += "\nArguments: ";
message += server.args();
message += "\n";
//server.sendHeader("access-control-allow-origin","*");
server.send(200, "text/plain", message);
Serial.println(message);
if (server.hasArg("ql")){
int ql = server.arg("ql").toInt();
#if defined (OV2640_MINI_2MP) || defined (OV2640_CAM)
myCAM.OV2640_set_JPEG_size(ql);
#elif defined (OV5640_MINI_5MP_PLUS) || defined (OV5640_CAM)
myCAM.OV5640_set_JPEG_size(ql);
#elif defined (OV5642_MINI_5MP_PLUS) || defined (OV5642_MINI_5MP_BIT_ROTATION_FIXED) ||(defined (OV5642_CAM))
myCAM.OV5642_set_JPEG_size(ql);
#endif
Serial.println("QL change to: " + server.arg("ql"));
}
}
void setup() {
uint8_t vid, pid;
uint8_t temp;
//set the CS as an output:
pinMode(CS,OUTPUT);
pinMode(CAM_POWER_ON , OUTPUT);
digitalWrite(CAM_POWER_ON, HIGH);
#if defined(__SAM3X8E__)
Wire1.begin();
#else
Wire.begin();
#endif
Serial.begin(115200);
Serial.println(F("ArduCAM Start!"));
// initialize SPI:
SPI.begin();
SPI.setFrequency(4000000); //4MHz
//Check if the ArduCAM SPI bus is OK
myCAM.write_reg(ARDUCHIP_TEST1, 0x55);
temp = myCAM.read_reg(ARDUCHIP_TEST1);
if (temp != 0x55){
Serial.println(F("SPI1 interface Error!"));
while(1);
}
//Check if the ArduCAM SPI bus is OK
myCAM.write_reg(ARDUCHIP_TEST1, 0x55);
temp = myCAM.read_reg(ARDUCHIP_TEST1);
if (temp != 0x55){
Serial.println(F("SPI1 interface Error!"));
while(1);
}
#if defined (OV2640_MINI_2MP) || defined (OV2640_CAM)
//Check if the camera module type is OV2640
myCAM.wrSensorReg8_8(0xff, 0x01);
myCAM.rdSensorReg8_8(OV2640_CHIPID_HIGH, &vid);
myCAM.rdSensorReg8_8(OV2640_CHIPID_LOW, &pid);
if ((vid != 0x26 ) && (( pid != 0x41 ) || ( pid != 0x42 )))
Serial.println(F("Can't find OV2640 module!"));
else
Serial.println(F("OV2640 detected."));
#elif defined (OV5640_MINI_5MP_PLUS) || defined (OV5640_CAM)
//Check if the camera module type is OV5640
myCAM.wrSensorReg16_8(0xff, 0x01);
myCAM.rdSensorReg16_8(OV5640_CHIPID_HIGH, &vid);
myCAM.rdSensorReg16_8(OV5640_CHIPID_LOW, &pid);
if((vid != 0x56) || (pid != 0x40))
Serial.println(F("Can't find OV5640 module!"));
else
Serial.println(F("OV5640 detected."));
#elif defined (OV5642_MINI_5MP_PLUS) || defined (OV5642_MINI_5MP) || defined (OV5642_MINI_5MP_BIT_ROTATION_FIXED) ||(defined (OV5642_CAM))
//Check if the camera module type is OV5642
myCAM.wrSensorReg16_8(0xff, 0x01);
myCAM.rdSensorReg16_8(OV5642_CHIPID_HIGH, &vid);
myCAM.rdSensorReg16_8(OV5642_CHIPID_LOW, &pid);
if((vid != 0x56) || (pid != 0x42)){
Serial.println(F("Can't find OV5642 module!"));
}
else
Serial.println(F("OV5642 detected."));
#endif
//Change to JPEG capture mode and initialize the OV2640 module
myCAM.set_format(JPEG);
myCAM.InitCAM();
#if defined (OV2640_MINI_2MP) || defined (OV2640_CAM)
myCAM.OV2640_set_JPEG_size(OV2640_320x240);
#elif defined (OV5640_MINI_5MP_PLUS) || defined (OV5640_CAM)
myCAM.write_reg(ARDUCHIP_TIM, VSYNC_LEVEL_MASK); //VSYNC is active HIGH
myCAM.OV5640_set_JPEG_size(OV5640_320x240);
#elif defined (OV5642_MINI_5MP_PLUS) || defined (OV5642_MINI_5MP) || defined (OV5642_MINI_5MP_BIT_ROTATION_FIXED) ||(defined (OV5642_CAM))
myCAM.write_reg(ARDUCHIP_TIM, VSYNC_LEVEL_MASK); //VSYNC is active HIGH
myCAM.OV5640_set_JPEG_size(OV5642_320x240);
#endif
myCAM.clear_fifo_flag();
if (wifiType == 0){
if(!strcmp(ssid,"SSID")){
Serial.println(F("Please set your SSID"));
while(1);
}
if(!strcmp(password,"PASSWORD")){
Serial.println(F("Please set your PASSWORD"));
while(1);
}
// Connect to WiFi network
Serial.println();
Serial.println();
Serial.print(F("Connecting to "));
Serial.println(ssid);
WiFi.mode(WIFI_STA);
WiFi.begin(ssid, password);
while (WiFi.status() != WL_CONNECTED) {
delay(500);
Serial.print(F("."));
}
Serial.println(F("WiFi connected"));
Serial.println("");
Serial.println(WiFi.localIP());
}else if (wifiType == 1){
Serial.println();
Serial.println();
Serial.print(F("Share AP: "));
Serial.println(AP_ssid);
Serial.print(F("The password is: "));
Serial.println(AP_password);
WiFi.mode(WIFI_AP);
WiFi.softAP(AP_ssid, AP_password);
Serial.println("");
Serial.println(WiFi.softAPIP());
}
// Start the server
server.on("/capture", HTTP_GET, serverCapture);
server.on("/stream", HTTP_GET, serverStream);
server.onNotFound(handleNotFound);
server.begin();
Serial.println(F("Server started"));
}
void loop() {
server.handleClient();
}
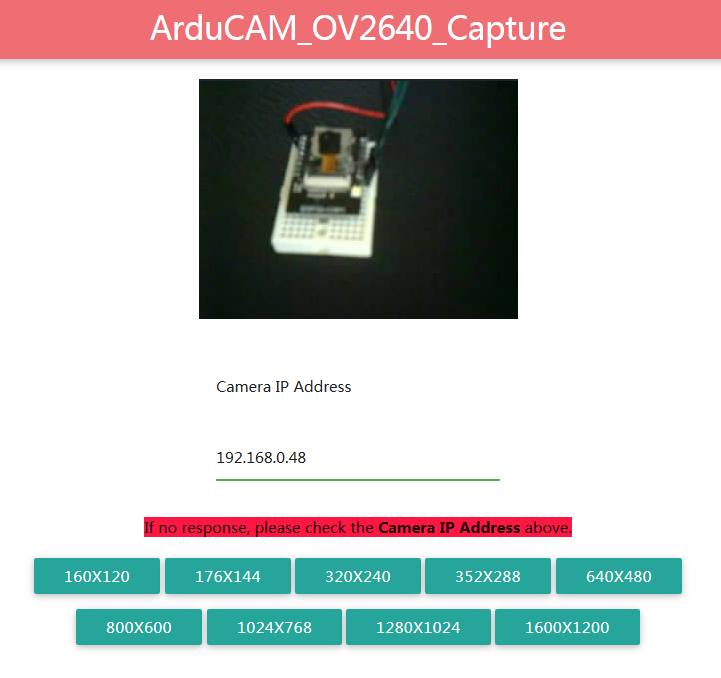
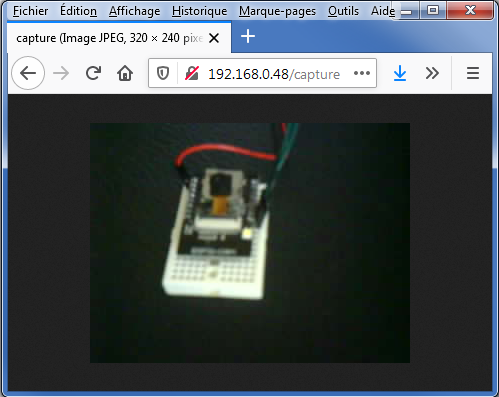
Tapez l’adresse Ip dans un navigateur…